 Success-Plan Services
Success-Plan Services Neil Puthuff
Neil Puthuff

As announced in July 2018, the second release of ROS2 – dubbed “Bouncy Bolson” – is now available for download from the ROS2 website for Intel Linux, Windows and iOS platforms.
If this sounds unfamiliar, ROS (Robot Operating System) is an open-source framework and tool suite for building robotic systems, and it comes in two primary flavors: ROS – the original research version using Python and XML, and ROS2 – a performance-enhanced version that uses DDS as its connectivity framework.
About ROS2 Bouncy Bolson
The ‘Bouncy’ release is special because it includes RTI Connext DDS in the binary distribution under a non-commercial license. Professional-grade DDS is now a cost-free option for researchers, evaluators and academics using ROS2 for robotics applications.
This means that the DDS tools and services ecosystem is available to all ROS2 users, thanks to the standards-based interoperability inherent to DDS including:
- RTI Admin Console: the go-to tool for diagnosing system connectivity issues.
- RTI System Monitor: the best tool for tuning and optimizing system performance.
- RTI Recording Service: high-bandwidth, long-duration recording and playback of topic data from your system.
- RTI Routing Service: an out-of-the-box solution that acts as an architectural bridge/gateway.
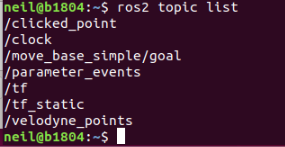
Let’s take a look at how RTI Admin Console can make diagnosing and understanding ROS2 connectivity issues a breeze. I recently put together a LiDAR data source for ROS2, and my initial attempt to display the data using RViz resulted in: no data. The terminal for RViz was not producing many helpful messages:


Admin Console
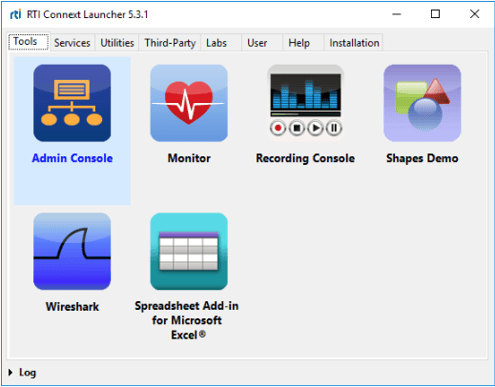
Let’s try diagnosing this problem using RTI Admin Console, which is conveniently available in the RTI Launcher:
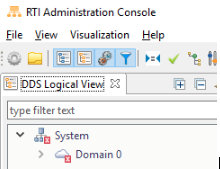
From the moment Admin Console is launched, it lets me know that there is a problem amongst the DDS network participants (note the red X box indicator):
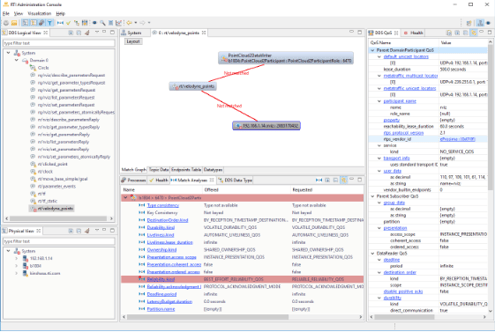
This QoS mismatch was immediately revealed by Admin Console, along with the details of every other participant in this ROS2 DDS network, including all of the normally-hidden internal topics of ROS2. At a glance I can determine that:
- There are some error log entries – will look at those later.
- There are a number of “Writer-only” and “Reader-only” topics. These are topics that can publish or subscribe to a topic, but do not have a complementary subscriber or publisher at this time.
- This system is running a mix of RMW layers from different DDS vendors. This is not a problem. DDS was designed for multi-vendor interoperability.
- When running with the Connext RMW layer, type code information is included in the DDS discovery traffic, and can be easily viewed in Admin Console:
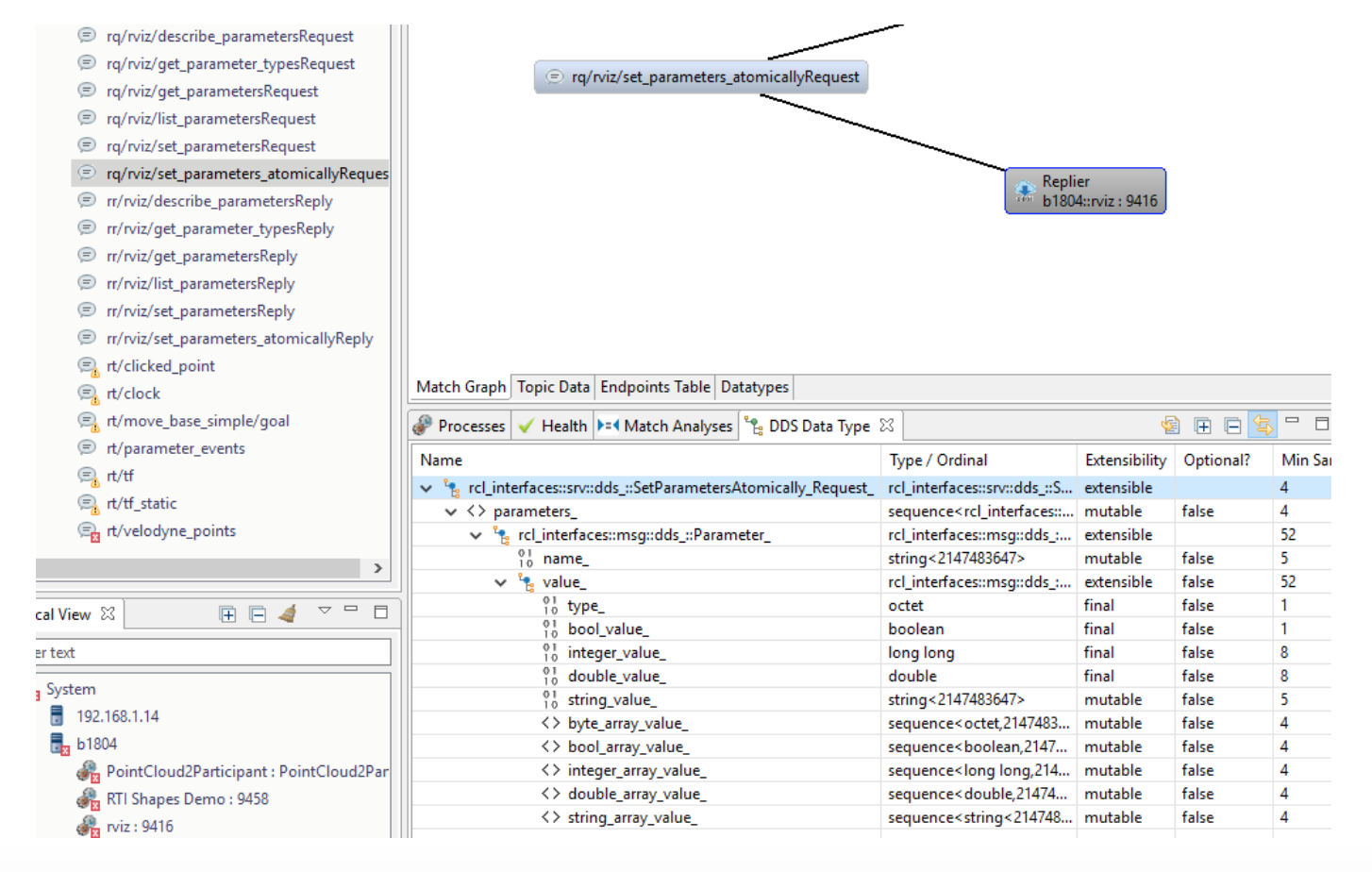
When using other RMW layers, this information is suppressed.
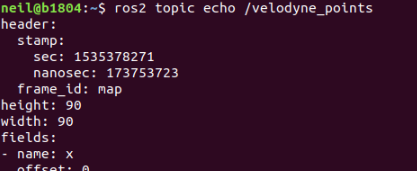
Admin Console can also subscribe to data topics and print or visualize their data values:
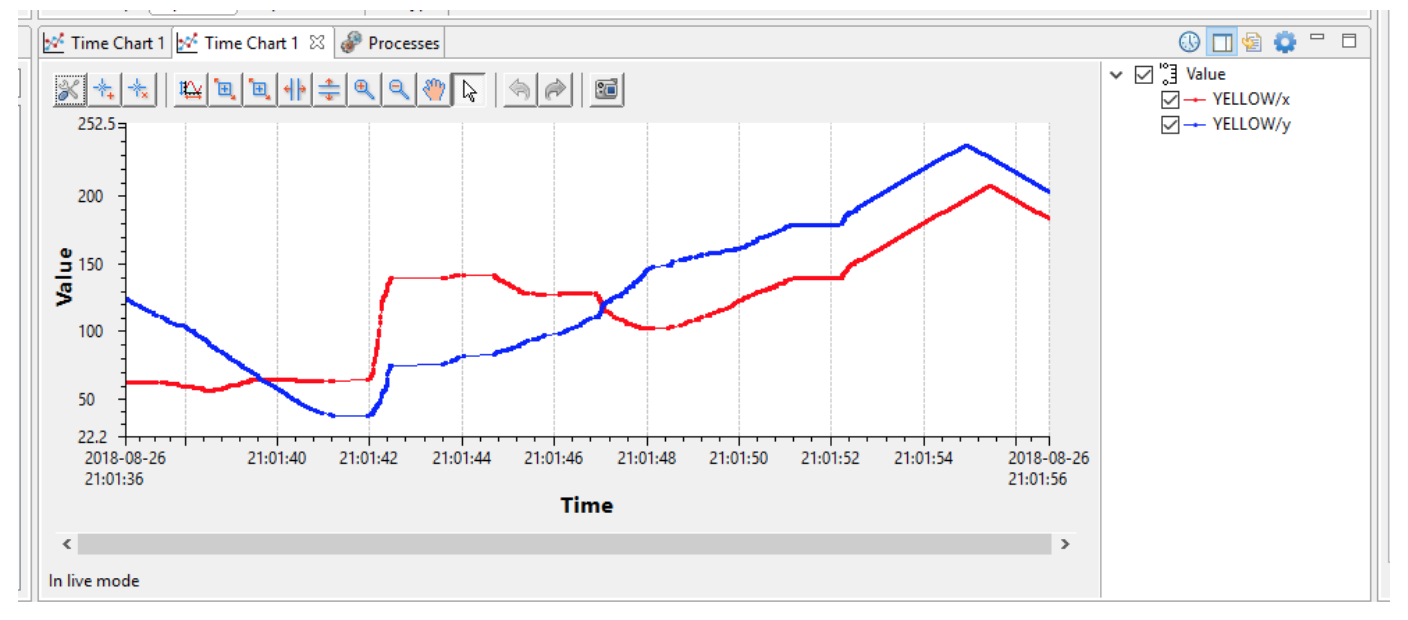
With the help of Admin Console, I was able to identify the QoS mismatch that prevented the data transfer and get the system running in a few minutes.
Read more blog posts highlighting the power of the combined ROS2/DDS ecosystem – to extend, diagnose and optimize a ROS / ROS2 system, and to provide enhanced 3D visualization to pure DDS systems.
ROS2 + DDS: A Field Guide to Interoperability
ROS2 + DDS Play It Again
ROS 2 and DDS: Interoperability Drives Next-Generation Robotics