 Success-Plan Services
Success-Plan Services Stan Schneider
Stan Schneider

Traffic is a daily reality. We burn billions of gallons of gas, waste billions of hours, and generate copious pollution in stop-and-go traffic. What a waste of time, resources and lives!
Carpool lanes were supposed to cut traffic by motivating people to double up. However, researchers estimate that only 10% of carpools are “induced”, or formed to save commute time. Far more cars in the lane are natural carpools (e.g. families), already-shared rides (buses and rideshare), exempt single vehicles, or cheaters. The coronavirus reduced traffic temporarily by decreasing overall demand. But post-Covid culture will only make inducing carpools harder. Carpools are instead now justified to encourage green vehicles and collect tolls. These may be valuable goals, but they don’t help traffic. The results are clear: carpool lanes do not work.
If we take a step back, it’s worse: the fundamental concept is flawed. Carpool lanes are only valuable because we can’t keep the other lanes moving. That is just plain wrong. The goal should be to use all lanes effectively.
It’s time to reexamine the fundamentals. Why does traffic happen? What can we do about it? Can emerging fast connectivity, intelligence, and robot-cars help?
The answers are encouraging. Everyone knows that Autonomous Vehicles (AVs) can someday replace human drivers to save lives and enable mobility. But even well before AVs completely replace drivers, technologies available very soon can work another wonder: emerging AV and metering control technology can be redirected to reduce traffic. Better yet, longer term, we can completely eliminate traffic by repurposing carpool lanes.

Figure 1: Traffic gets worse every day, and carpool lanes haven’t helped.
What Causes Traffic?
Let’s start by understanding the problem. Traffic engineers usually plot “flow” vs. “density” to model traffic. As a networking engineer, I’ll try a different view, based on network congestion models. The plot below shows a typical throughput graph from queuing theory. Consider it a single lane on a freeway. The vertical axis is throughput, measured as the number of vehicles passing a given point per unit time. The horizontal axis is “offered load”, the number of vehicles entering the system per unit time.
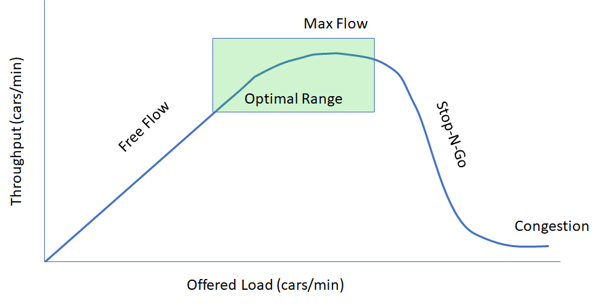
Figure 2: Lane Throughput. As cars enter the lane, throughput increases. Eventually, it hits a maximum. Adding more cars after the maximum causes congestion, with a dramatic loss of throughput. Operating the lane in the green box maximizes throughput, as long as we stay away from the “cliff”.
At low offered load, each new vehicle rolls along at the speed limit, increasing the throughput by one. So, throughput rises linearly with load. At some point, the lane gets congested and the throughput can’t keep up. So, it rolls off as cars pack into the lane. If you keep adding load, throughput “crashes”. A congested lane supports greatly reduced flow.
In a typical traffic situation, the maximum throughput corresponds to a speed of about 45mph. That’s where drivers have packed in as close as they are comfortable and the brake lights start twitching. So, if you are moving at 45mph on a freeway…get ready to stop. Any more load, or any disturbance, and your lane speed will drop to almost zero very quickly.
Phantom Jams
That’s the story for our lane at only a single point. It gets much more interesting if you look at a lane over a distance. As you pack more cars into the lane, the congestion will somewhere exceed the maximum. Throughput drops at that point. Behind that, cars pile in at a faster rate than the blockage can handle. Traffic backs up as the jam grows.
Of course, now the congested lane can’t carry as much traffic, so at the front of the jam, offered load drops. That raises throughput, and cars speed away from the blockage. You have likely noticed this “phantom jam” phenomenon. Sometimes there’s a reason for blocked traffic, like an accident or lane merge. But, most of the time, when you get to the end of a slow spot, traffic clears out completely and there’s no obvious reason.
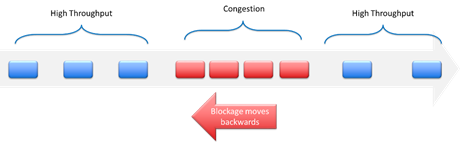
Figure 3: Congestion model. When a block forms, throughput is low in that region. Cars from behind add to the block quickly. Cars in the front leave the block. Thus, the blockage moves backwards over time. If enough cars enter, the entire lane becomes blocked.
This creates a “wave” of stopped cars that moves backwards over time. High throughput feeds the block from behind. High throughput clears the block from the front. The blockage shifts backwards over time.
In reality, it’s a bit more complicated than that, because in most situations, vehicles are entering and leaving the system. With uncontrolled entry, the entire system can exceed the maximum throughput level and everything gets completely clogged up.
Metering lights can help by restricting incoming flow. Unfortunately, today’s metering lights simply slow down the offered load. They keep adding cars, even when the road is already blocked. They simply aren’t smart enough to keep the lane moving.
Wither Carpool Lanes?
So, how can we fix this? First, we have to agree on the goal. If all lanes were always carrying their maximum flow, potential improvement in overall throughput is dramatic! Even operating short of the maximum throughput to avoid the “cliff” is much preferable to blockage. We must set a clear goal: no lane should ever stop. With such a system, throughput will rise. Commute times would be well bounded. There would be little reason to check Google for traffic conditions, because there wouldn’t be much traffic.
And carpool lanes would make no sense.
This does imply some “storage” of vehicles waiting to join the flow. We can still reward carpools or electric vehicles by offering quicker access to the moving traffic. Drivers would have to realize and agree that the longer wait time to get moving is well worth an overall shorter commute.
Limit Offered Load
With that goal agreed, we can get smarter and better control the offered load. If we can measure the traffic speed, we can detect congestion waves. Waves move backwards, fed by incoming traffic. By holding back that incoming traffic, we can then send “anti-waves” of lower offered load, reduce the blockage and keep traffic moving.
Today, we try to control the offered load with metering lights. But they’re not even based on active sensors; they just space out cars with timers. The metering lights and flow rates must be based on measured traffic conditions, not on inflexible timing.
Traffic blocks build and ease in a few seconds. This is an active feedback control problem: measure the load and dynamically adjust the load. It has to be fast enough to detect and cancel waves. The system cannot effectively control traffic blocks by blindly adjusting flow rates on a predetermined schedule as metering lights do today.
To operate in the optimal flow zone, the system needs dynamic traffic sensing along the lanes with sample rates of a few minutes. This is doable today; it’s around the response speed of the Google traffic app. The metering controller can then use this dynamic sensing to lower load when it detects a congestion wave forming ahead. The change from timed, random, ineffective metering to actively-measured feedback control alone would greatly reduce traffic.
Cooperative Vehicles Can Prevent Blocked Lanes
But we can do far more with some cooperative vehicles. Lowering load with metering lights can’t easily control flow when lanes merge or when there’s a temporary block that concentrates flow. There are many ways that load can exceed carrying capacity.
To keep lanes moving all the time we must also prevent blockage with the vehicles already in the flow. This could be done with cooperative driving. For instance, we can ask drivers to look ahead for slowing cars and slow down immediately before adding to the blockage. Of course, that assumes the other cars also do this rather than just passing the slow car. That’s unlikely — history is riddled with failed plans that assume a change in human nature.
AVs can help here; they don’t suffer from human nature. Even a few “altruistic” vehicles that slow in advance of a blockage could reduce the incoming offered load, mitigate the blockage, and greatly increase overall flow.
They have to know when to slow down, and that would require sensing of the blockage. A widespread vehicle-to-vehicle (V2V) system would be best, but that’s hard. Fortunately, simpler local solutions could work. For instance, some researchers suggest backwards-looking tailgating control could suffice. Updates from today’s online traffic monitoring like Google Maps may even be fast enough, and that is already available in every car.
We don’t have to wait decades for this improvement! Phones or smart cars can provide the sensing. The vehicle control is very simple. The vehicles just need to choose a lane and a speed based on traffic. That is possible today with systems like Tesla’s AutoPilot. At least in California, there are plenty of Teslas on the road, so an AutoPilot anti-traffic app could greatly reduce congestion…right now.
It won’t be perfect, but feedback metering and blockage mitigation should be able to get close to our most important goal: keep all lanes moving. And they are both doable with today’s technology.
Robolanes Can End Traffic
Soon, we can do far more by making even better use of carpool lanes with smarter AVs.
How? We have all those soon-to-be useless carpool lanes, already separated from the main flow with special lanes and flyovers. If these carpool lanes allowed only AVs, smart vehicles could be programmed to maintain equal spacing both front and back. That alone will end phantom blocks.
Much more enticing, an AV has a much faster control system, and could be programmed to greatly reduce the spacing between vehicles. This may sound unsafe, but spacing is only really needed to account for human-response delay. An automated control that reacts to changes in milliseconds instead of seconds can safely drive in much closer formation.
Even better, it’s safer. Collision severity is a function of difference in speed. If the car in front of you has less space to decelerate, then if your car does hit it, the collision will be at a lower relative velocity. In fact, the safest way to travel would be to touch the bumper in front and behind you, like a train. That way, if there is an accident, you can “ride down” the acceleration profile of the cars in front of you. That is much better than crashing into a stopped car. Human drivers can’t drive in a train, but AVs can and someday will, when the control systems support it and physical connections are standardized. Traveling together is faster, safer, and more energy efficient.
Putting these together, an “AV only” lane could pack in far more cars, avoid phantom blocks, and be safer. Implementation will take some work, including controller and V2V standards. However, properly written safely protocols can work without perfect communications between vehicles.
Just converting carpool lanes into never-blocking robolanes could easily double throughput. Programming cars to drive together to eliminate inter-car space could add another factor of five or more. And as we increase the number of capable cars, we can migrate more lanes to be robolanes. This incremental path can end traffic…forever.
Let's Fix Traffic
We have already invested billions building flyover interchanges, metering lights, and carpool lanes. Let’s face it; they haven’t worked. Instead of these strategies, we should focus on a new goal: intelligently controlling traffic.
First, let’s keep all lanes moving all the time. Simple fixes can make a difference quickly: using inexpensive sensors to control metering and using our existing best AVs to mitigate blockages. Longer term, we can repurpose carpool lanes to work with the emerging AV revolution. These together will cost less than the current trend to improve or build new carpool lanes. Instead of slightly better carpool lanes, let’s stop the absurd waste of all the other lanes.
I, for one, would much rather spend our billions solving the problem than perpetuating a broken system.
About the author
 Stan Schneider is CEO of Real-Time Innovations (RTI), the largest software framework provider for smart machine and real-world systems.
Stan Schneider is CEO of Real-Time Innovations (RTI), the largest software framework provider for smart machine and real-world systems.
Stan also serves on the advisory board for IoT Solutions World Congress. Stan holds a PhD in EE/CS from Stanford University.