 Success-Plan Services
Success-Plan Services
As automotive manufacturers respond to the growing consumer demand for semi-autonomous and fully autonomous vehicles, they need to take a fresh approach to vehicle design. The traditional design of electrical and electronic architecture doesn’t work for the connected digital vehicles of tomorrow, which require software-driven approaches and scalability to enable a new data-centric approach.
Designing these vehicles requires using a combination of revolutionary architectures and evolutionary technologies to fulfill an ever-increasing need for high-performing interconnected systems. The architecture must seamlessly integrate software and hardware from multiple vendors, support compliance with evolving standards and enable continuous feature and performance improvements.
Enter AUTOSAR and Data Distribution Service™ (DDS), the two software standards designed for flexible, scalable architectures. AUTOSAR is the standardized automotive open system architecture designed for automotive Electronic Control Units (ECUs), with two AUTOSAR platforms – AUTOSAR Classic and AUTOSAR Adaptive – that provide a layered software architecture approach for different vehicle use cases. In particular, the AUTOSAR Adaptive platform addresses the design challenges of in-vehicle high-performance compute and addresses the connectivity and continuous software updates necessary for next-generation vehicles. It also acts as an integration platform for software from multiple suppliers.
DDS provides a data-centric connectivity framework that integrates all the components of a distributed system. With DDS, the data is designed to be at the center of future mobile digital platforms through low-latency data connectivity, extreme reliability and a scalable, flexible architecture. DDS fosters the development of a loosely coupled, modular and open architecture system that reduces complexity, time to market and system costs.
Now, these powerful standards work together to enable interoperability and advanced functionality for the industry. In the AUTOSAR Adaptive platform, DDS components are optimized for end-to-end data sharing without the need for custom integration. AUTOSAR Adaptive defines a DDS network binding to support autonomous systems with a production-ready communication framework that delivers the reliability, scalability and performance required for complex systems. Together, AUTOSAR and DDS provide automotive manufacturers with a high-performance approach to designing and operating next-generation vehicles. Here’s a closer look – which is described in more detail in our new whitepaper.
By design, the AUTOSAR Adaptive Platform Communications Management architecture is independent of specific network communication technologies and is specifically based on Service-Oriented Architecture (SOA). Scalable service-Oriented Middleware over IP (SOME/IP) was the first technology to be incorporated in the Communications Management functional cluster, and DDS promptly followed in March of 2018 with the release of 18-03 of the AUTOSAR Adaptive Platform standard materials.
DDS represents a sizable evolutionary step from SOME/IP, bringing in a large catalog of standard built-in features, such as content- and time-based filtering, transport-independent reliability, partitioning, durability, liveliness, latency/deadline monitoring, extensible types, and more. There are important benefits when AUTOSAR Adaptive works with DDS to build upon a communications framework that is not only compatible with existing ara::com APIs and applications, but also able to provide important benefits for reliability, performance, flexibility and scalability.
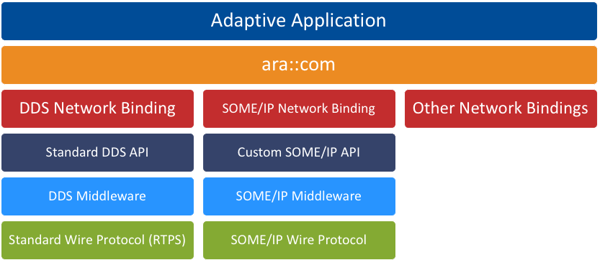
From an architectural standpoint, the DDS Network Binding shares a common conceptual space below the ara::com Functional Clusters (as shown in the figure below), where each network binding translates common ara::com API and meta-model SOA semantics to its own set of middleware-specific API calls that eventually produce either ECU-local or remote inter-process communication. While SOME/IP only standardizes the low-level interoperability wire protocol (shown in the green boxes), DDS standardizes the platform-facing APIs as well (dark blue boxes), leading to interoperability across industry vendors at both the wire and source code levels.
While DDS is not an official part of the AUTOSAR Classic platform, it can be quite useful in the design to replace or complement the communication features. For example, integration of leaf nodes in the vehicle's electronic architecture, such as smart sensors, can greatly benefit from being seamlessly integrated into the DDS databus.
DDS addresses the following non-functional requirements in digital vehicle systems:
- Scalability, as the modern vehicle has become less of a product and more of a platform, where the customer purchases and auto-installs OEM-authorized updates and new features
- Interoperability, where vendors inside and outside the OEMs’ supply chains compete to provide built-in and off-the-shelf components (both in hardware and software) that must integrate seamlessly
- Functional safety and cybersecurity, in an ever-growing attack surface where not only privacy, but also immediate physical harm is at stake
- Performance, with an ever-growing number of richer data streams circulating both within and beyond the vehicle
RTI and ITK Engineering GmbH are working together to help OEMs integrate DDS with AUTOSAR to achieve a data-centric exchange in autonomous vehicle development. Our combined experience in DDS and AUTOSAR services reduces project risk and provides a faster implementation with a best-of-breed approach for using the two standards through an integrated architecture and customized engineering services. We invite you to read more in our new joint white paper – and to join us on April 8 for an interactive webinar with Q&A.
About the authors
 Kai Richter is a senior expert and has been working for ITK Engineering GmbH since 2012. Starting as an AUTOSAR coach, he supported customers in configuration and consulting projects in various industries such as automotive and agriculture. Today, he focuses intensely on the themes AUTOSAR Classic and vehicle computer. Richter studied computer science at Karlsruhe Institute of Technology in Germany.
Kai Richter is a senior expert and has been working for ITK Engineering GmbH since 2012. Starting as an AUTOSAR coach, he supported customers in configuration and consulting projects in various industries such as automotive and agriculture. Today, he focuses intensely on the themes AUTOSAR Classic and vehicle computer. Richter studied computer science at Karlsruhe Institute of Technology in Germany.
.png?width=200&name=Preferred%20(5).png) Emilio Guijarro Cameros is an Automotive Applications Engineer at Real-Time Innovations (RTI). His work focuses on research and project development that involves the integration of RTI Connext with automotive technologies, AUTOSAR in particular. Emilio’s background adds up to 15 years of international experience, as Project Manager, Software Engineer and Technical Lead in the Automotive, Consumer Electronics, Air Traffic Management and Defense industries, specializing in digital video processing and communications at all scales, from microcontroller systems to military fleets. He received his degree in computer engineering from the University of Cádiz.
Emilio Guijarro Cameros is an Automotive Applications Engineer at Real-Time Innovations (RTI). His work focuses on research and project development that involves the integration of RTI Connext with automotive technologies, AUTOSAR in particular. Emilio’s background adds up to 15 years of international experience, as Project Manager, Software Engineer and Technical Lead in the Automotive, Consumer Electronics, Air Traffic Management and Defense industries, specializing in digital video processing and communications at all scales, from microcontroller systems to military fleets. He received his degree in computer engineering from the University of Cádiz.