 Success-Plan Services
Success-Plan Services
RTI Connext Drive is the only standard-based framework to support autonomous vehicle development from prototype to production. This safety-certified connectivity framework is ideally suited to meet both current and future technical requirements — along with non-functional requirements in one scalable, interoperable framework for autonomous vehicle development.
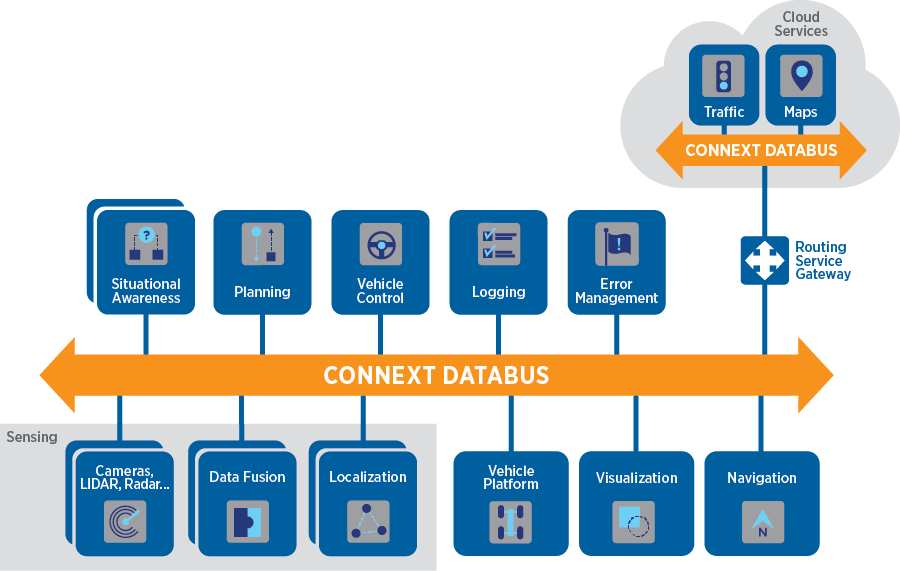
Connext Drive communicates from ECUs all the way to the Cloud, meeting the latency, throughput and scalability requirements of even the most demanding use cases – for example, scalable sensor fusion – using extensive QoS (Quality of Service) parameters, peer-to-peer connectivity and efficient handling of large data.
Interoperability Support for Multiple Platforms
Connext Drive is a data-centric, interoperable framework that supports nearly 100 different platforms, including the most common systems used in autonomous system development. Code can be reused across vendor platforms, saving time and cost. Extensible file types allow for the evolution of the system without breaking interoperability.
RTI Connext supports the use of the Data Distribution Service (DDS®) standard in ROS 2 and the AUTOSAR Classic and AUTOSAR Adaptive platforms. Its layered databus architecture connects these and other systems together for optimized end-to-end data sharing without the need for customized coding.

