Next-Generation Distributed Maritime Systems
Building autonomous maritime systems is incredibly challenging due to the ever-changing environment and adversarial threats. Undersea systems have additional challenges as they submerge and lose communications.
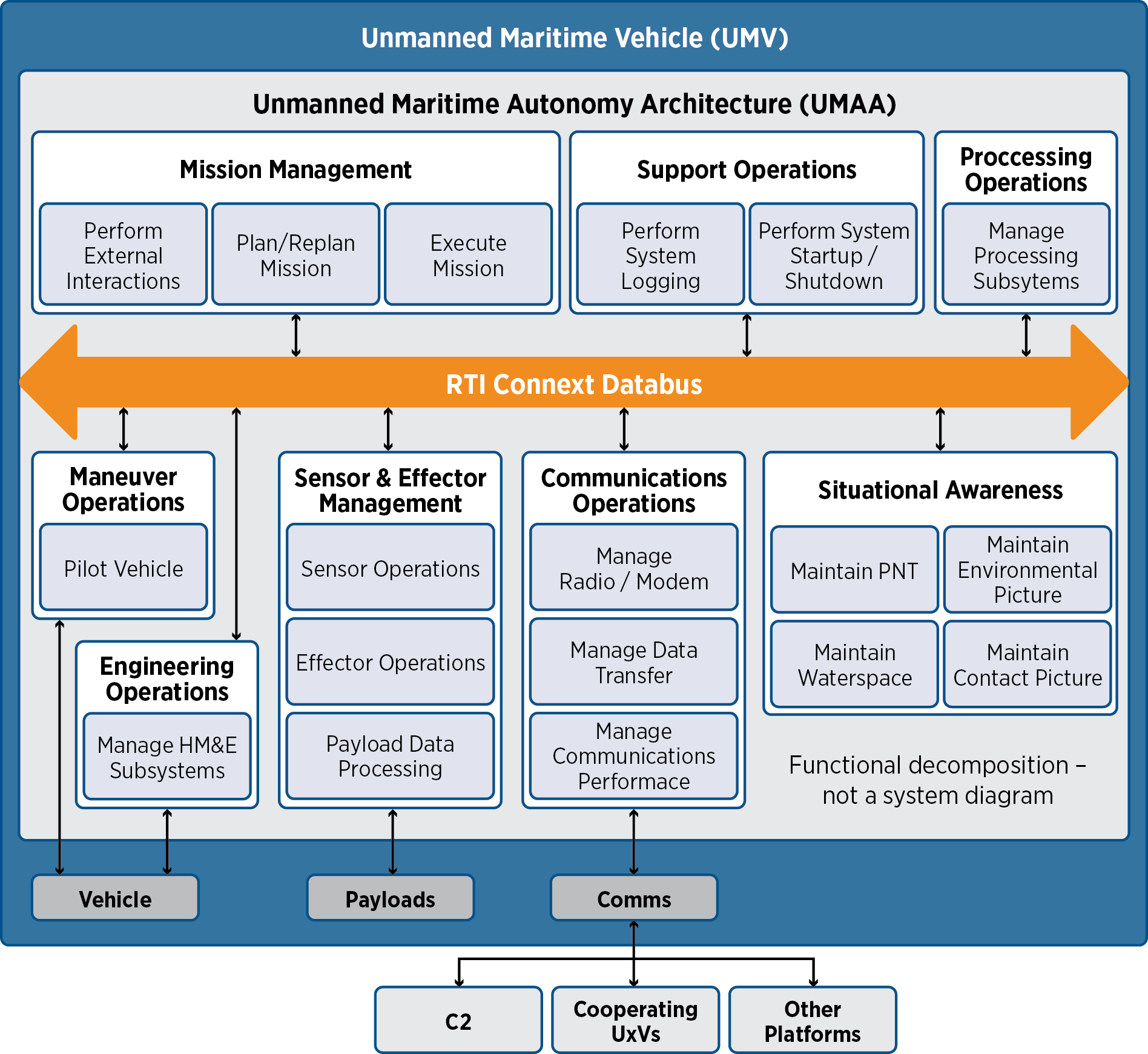
To help meet these challenges, the U.S. Navy has developed the Unmanned Maritime Autonomy Architecture (UMAA) to define a comprehensive data model and a standardized group of services required of maritime vessels and systems. This data model and the required services connect via a common connectivity framework, based on the Data Distribution Service (DDS™) standard.
RTI Connext implements the UMAA Autonomy Bus as defined in the UMAA Architecture Document, and provides fast, scalable, reliable, and secure connectivity for on- and off-vehicle communications in real time. Through its integration with UMAA-based designs, Connext enables rapid system updates and mission readiness, while driving down system maintenance costs.
 Success-Plan Services
Success-Plan Services