 Success-Plan Services
Success-Plan Services
AUTOSAR Adaptive
AUTOSAR Adaptive defines a DDS network binding to support autonomous systems with a production-ready communications framework that delivers the reliability, scalability and performance required for complex systems.
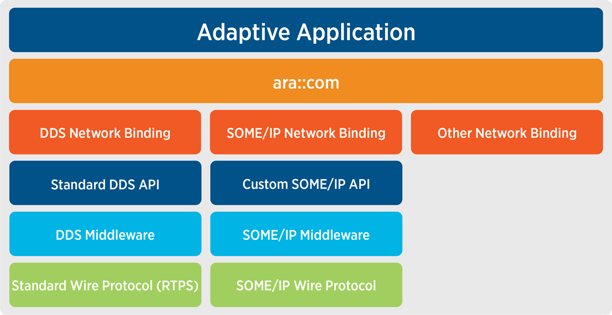
AUTOSAR Adaptive architecture specification includes the DDS standard
AUTOSAR Classic
AUTOSAR Classic can be easily integrated with Connext Drive product components by using RTI’s Connext Integration Toolkit for AUTOSAR Classic. It supports automatic conversion of data type definitions across standard formats (OMG® IDL, OMG DDS-XML and AUTOSAR ARXML). The Toolkit also generates supporting C code for data conversion and marshaling between the Runtime Environment (RTE) and DDS communication frameworks.
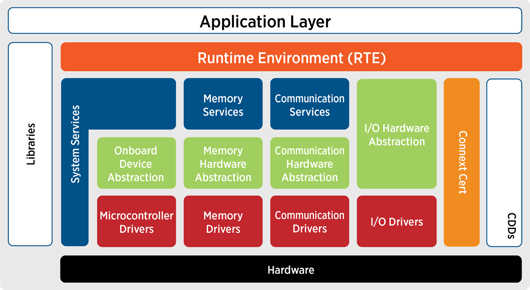
AUTOSAR Classic using RTI’s Connext Integration Toolkit for AUTOSAR Classic
Support for ROS 2
RTI applications support the ROS 2 open source project. Connext Drive provides the Robotic Operating System (ROS) community with a proven connectivity platform that is interoperable with other DDS implementations, is scalable, has robust security, and is proven in multi-billion dollar production environments.
Download the latest version of ROS 2 today from the ROS repository. View the ROS 2 design wiki.
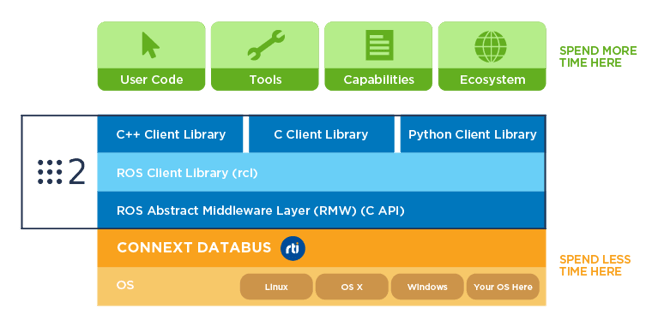
The Open Source Robotics Foundation is building ROS 2 on DDS, in order to spend more time on features that add value to the ROS community