 Success-Plan Services
Success-Plan ServicesConnext Robotics Toolkit for ROS 2
Speed all phases of your ROS 2 development, from initial prototyping through production


When Both Time and Trust Matter
The Connext Robotics Toolkit is a distributed computing platform for ROS 2. It speeds development while providing the reliable and secure inter-node communication essential for mission-critical robotic and autonomous systems. Free for prototyping and non-commercial use, the toolkit includes:
- The most robust and proven ROS Middleware (RMW) implementation – Connext – for hassle-free development and worry-free deployment
- Tools to easily monitor, optimize and debug inter-node communication
- Seamless interoperability between applications that use ROS and DDS interfaces
- Easy incremental migration of ROS prototypes to native Connext for higher performance and safety assurance in production




Click image for larger view
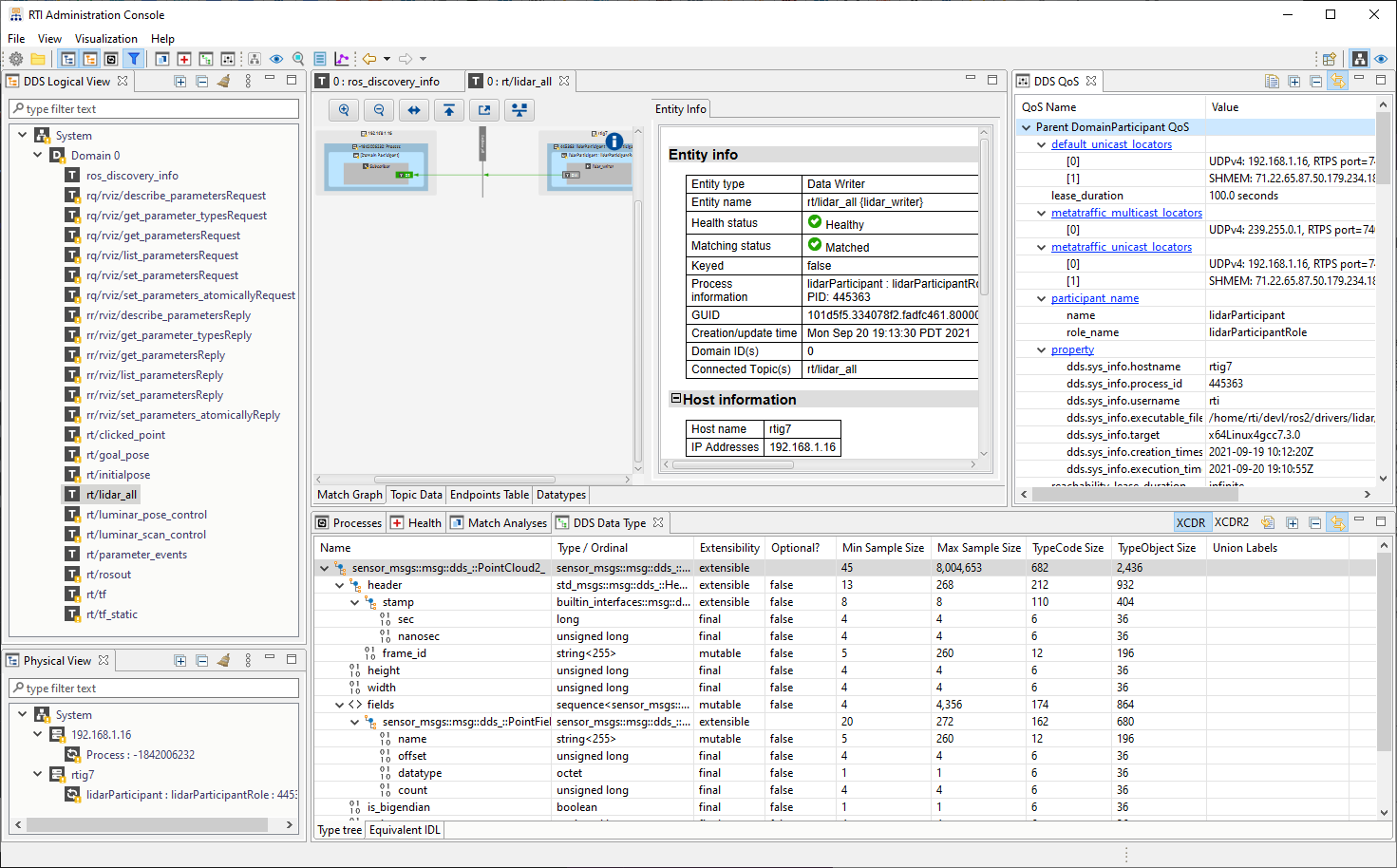
Administration Console
Easily visualize the run-time topology of your distributed system, view log messages, manage infrastructure services, introspect data, and debug inter-node communication problems.
Click image for larger view
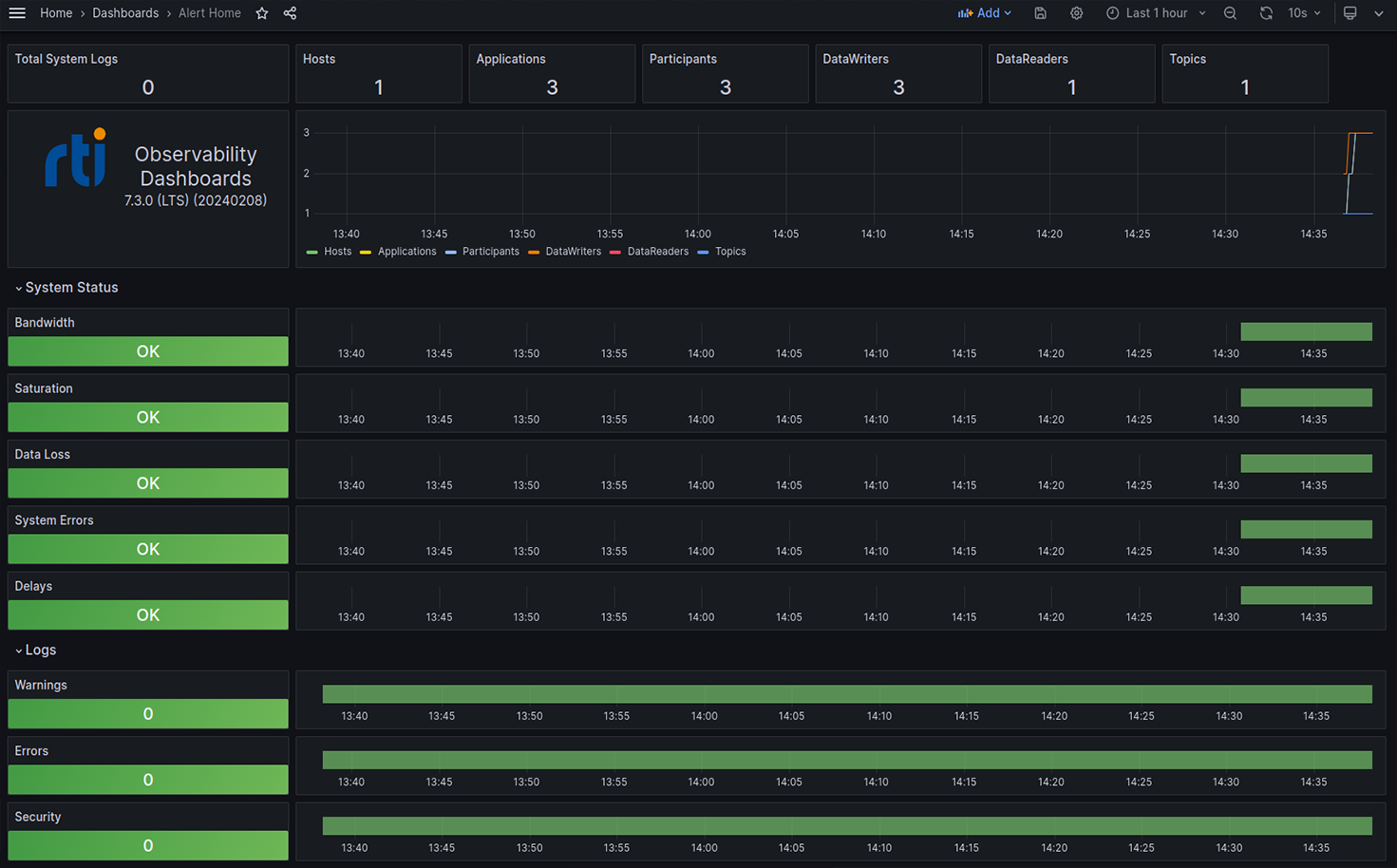
Observability Framework
Monitor the run-time behavior of your system to proactively manage its health and optimize performance. Fully integrated with Prometheus, Grafana and OpenTelemetry.


