Success-Plan Services
Success-Plan ServicesMicrogrid Optimization
Create an ad hoc microgrid with a variety of resources that reacts dynamically to the addition of load and generation resources
Introduction
With the power grid becoming even more dynamic, there is a need for not only microgrids, but microgrids that can adapt to a changing topology. With the addition of Electric Vehicles (EV) and the need to adapt to failures due to fire and weather, the layout of a microgrid, and the availability of resources, may change relatively quickly.
This creates many operational challenges that need to be addressed in the design of communication, control, and protection systems. Different grid scales also require different solutions, with transmission networks having significantly different requirements than substation-level microgrids. Architecting the multiple layers so that they work together without conflict is essential. The grid infrastructure needs efficient, advanced communications, control and metering infrastructure at all levels. At the edge, microgrids need to not only be able to operate independently for at least short periods of time, but also need to provide services to the larger networks including power generation, power quality control, voltage and frequency support, and load balancing. As resources at the edge change over time, being able to plug-and-play Distributed Energy Resources (DERs) and properly share the current state among them is critical. This is where RTI Connext has a critical role. This Case + Code provides a framework and reference architecture for grid edge interoperability and distributed intelligence. The framework consists of business-driven, top-down business case, use case, data modeling and implementation approaches.
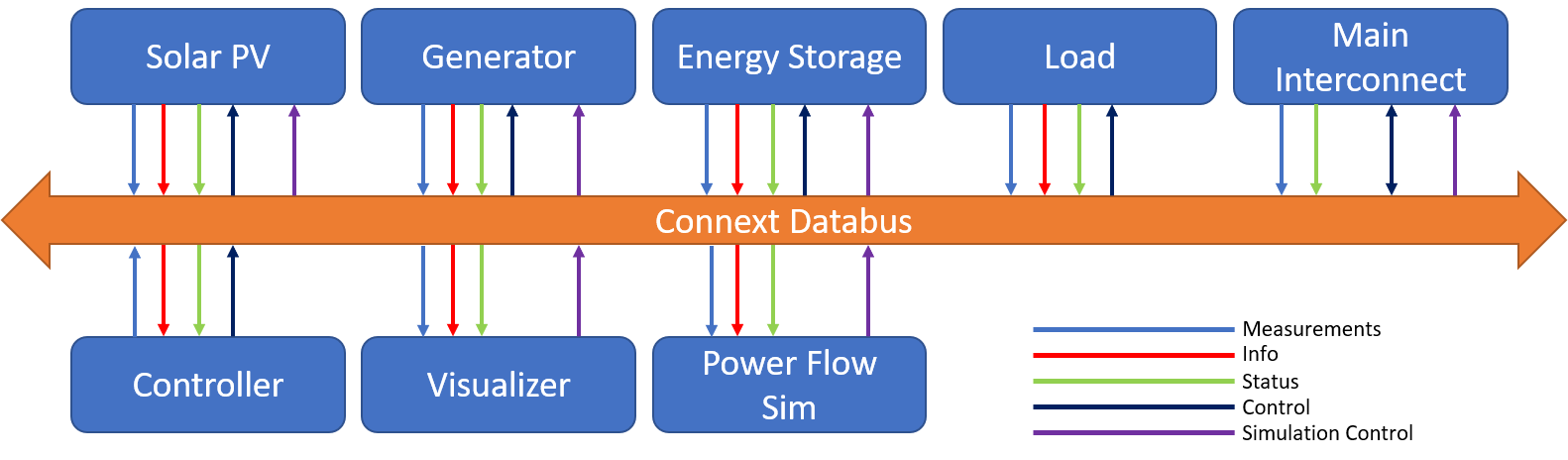
The following diagram illustrates communication within and between the different components.

The grid of the future will require treating data differently; leveraging metadata and performing analysis locally to process the mountain of new data available from new technologies. Traditional headend systems have relied on relatively few sources of field information. New asset classes on the grid (AMI, smart inverters, PMUs, etc.) have added large amounts of data that can quickly and accurately describe the state of the power system. Traditional headend systems were not designed to process this increased volume of information as quickly as is needed to react to current operational scenarios and fully realize the benefits of these new grid edge assets.
Information no longer needs to go to the central system to enable decision making. Federated local data can be made securely available between assets at the grid edge to complement and enhance operations. As resources come online and go offline, this data can be used to maintain microgrid viability and even network groups of microgrids together when disconnected from the main grid.