

在汽车市场,开发自动驾驶汽车会带来巨大的风险和不确定性。有几个资金雄厚的竞争对手朝着不同的方向发展,商业模式尚未得到验证,技术仍在开发中。大多数传统的汽车公司正在将重点从硬件转移到软件,同时探索新 的业务模型并在开发过程中创建自己的解决方案。
但是,自治系统中的软件是一个复杂的问题。汽车越来越成为互连计算机的网络——其中一些是功能强大的CPU,而另一些则是低端微控制器,它们都参与处理数据、做出决定和/或争夺资源。当包括图像和激光雷达处理、传感器融合、驾驶控制和遥控操作时,互联数量会增加,因此系统的复杂性也会增加。
解决这一日益增长的问题所需的技术必须能够实时共享数据并处理具有不同优先级、源和目的地的大量数据,创建一个更为可靠和稳健的解决方案。对于传统和非传统的汽车竞争对手来说,在安全关键的环境中构建软件具有一系列具有挑战性的要求,并非所有软件解决方案都能胜任这一任务。那么,目前有哪些可供选择的自动驾驶汽车软件解决方案来应对制造未来汽车的广泛要求?
目前可供选择的四种连接方案
减轻这些风险的最佳方法之一是确保自动驾驶汽车开发人员可以快速创新并适应不断变化的市场条件和技术进步。通过在开发过程的早期选择正确的软件平台策略,公司可以确保他们拥有正确的基础以保持竞争优势。选择这种技术有四种不同的方法:
第一种选择是利用为大规模系统开发的云和企业技术,这些技术将适用于远程操作等解决方案。但是,这些解决方案并未针对需要实时响应的自治系统进行优化。让我们想象一下一种自动驾驶场景,您将使用LIDAR检测障碍物,在这种情况下,我们需要最小化激光雷达和障碍物检测应用之间的等待时间。如果使用基于云的解决方案,则会为可能在同一ECU中运行的通信增加延迟,更不用说来回通过计量连接发送的数据量。此外,大多数服务器都具有面向服务器或代理的架构,这会导致单点故障,并可能对系统的健壮性造成巨大风险。
第二种选择是从头开始构建解决方案。汽车制造商有时会认为他们的数据交换要求如此专业,以致现有解决方案无法解决这些问题。他们需要多个非常特定的数据流:较小的高优先级数据,例如制动信息或警报,在多个位置,命令和响应中需要大量的流数据,仅在给定条件下才需要的数据等。但这是真的吗?这些方案是否如此独特,以至于需要临时实施?这些场景不仅在汽车用例中很常见,而且在任何现实世界的自治系统(例如飞机,火车,航空航天和国防车辆)中都是常见的。因此,从头创建连接解决方 案可能意味着需要花费大量资源和时间。在大多数情况下,汽车公司提供的价值主张不是如何集成软件或如何实现实时联网性能,而是更多地存在于其高级算法和功能中。而且,只有当基础架构及时提供必要的数据时,这些独特的算法和功能才能够增加真正的价值。
第三种方法是选择一种新的汽车平台,例如AUTOSAR Adaptive、ROS 2、Apollo等,并围绕它们构建系统。尽管其中一些是新技术或行业特定的技术,但这些技术已成为汽车生态系统的一部分,可以为成千上万使用它们的人提供有用的资源。例如,您可以在ROS中找到方便的图形应用程序,以可视化视频、雷达和LIDAR。但是,问题在于哪一个是最佳选择。有许多方面需要考虑:集成优势(例如,我的提供商使用最多的是哪个?)、最佳性能和健壮性、认证途径、安全性等。但是,一旦选择了解决方案,如果技术要求发生变化怎么办?至关重要的是,自动驾驶汽车开发人员选择的任何解决方案都必须能够应对这个不断发展的行业趋势。
第四种方法是使用基于标准的关键技术中已证明的基础技术。上面提到的几种汽车平台都使用Data Distribution Service™(DDS)标准作为其核心。 DDS在航空航天,国防和医疗保健等不同市场的关键任务项目中已使用了数十年。该标准连接解决方案提供:
- 实时性能
- 细粒度的数据控制,包括实时的发布者端过滤
- 服务质量(QoS),涵盖可靠性、持久性、期限和活跃性
- 使用称为实时发布订阅(RTPS)的通用线路表示,供应商之间的安全性、多功能性和互操作性
DDS旨在允许轻松集成不同的技术,因此,也许有最后一种选择:集成上述一项或多项,并在不费吹灰之力的情况下,最合理地使用每一项来满足系统的关键需求。
分层数据总线架构
自动驾驶汽车不是一个孤立的系统。它是一个系统的系统,结合了不同的硬件和软件解决方案、业务逻辑、市场、供应商和业务模型等。它需要一种独特的体系结构,该体系结构可在边缘实现实时性能,同时集成不同的操作域,并实现跨不同公司(甚至竞争对手)构建组件的互操作性。它必须是一个安全的解决方案,不仅可以防御恶意攻击,还可以保护业务逻辑。此外,此体系结构必须还能够处理系统中的大量参与者。换句话说,它需要可扩展性。最后,此解决方案需要(至少部分)可认证,因为许多子系统都需要认证,例如ISO 26262。
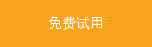
在图1中,我们介绍了一个分层的数据总线体系结构,该体系结构可以满足上述要求以及更多要求。
首先,该体系结构允许创建不同的隔离操作域。这些域中的每一个都可以包含DDS数据总线,该DDS数据总线允许在该域内交换数据。可以配置该数据,以便只有需要数据的组件才能接收它,从而减少了不必要的数据传输中浪费的资源。借助20多种QoS属性,这种域内通信是高度可配置的。这些属性支持不同的用例,例如:高通量大数据、低延迟数据、可靠或最大努力、容错等等。这使我们能够获得所需的边缘性能。
由于DDS是一种标准,因此它提供了一种定义标准数据模型的简便方法,该模型将由不同的竞争对手共享。但与此同时,它允许这些数据模型通过使用可扩展类型进行扩展,以添加使车辆独一无二的特定细节。而且,由于DDS已被汽车标准技术所采用,因此汽车制造商可以利用AUTOSAR或ROS所需的任何部件,而只需进行最小的改动即可。此外,当在不同域之间需要数据时,将使用软件网关(基于DDS的工具)根据其内容自动桥接。在该网关中,我们可以执行转换和调整,以便可以在其他层中理解在一个域中获得的数据。例如,当数据传输到车外时,我们可以添加唯一的标识符(例如,车牌号),或将速度转换为其他度量系统。这实现了跨操作域的集成和互操作性。
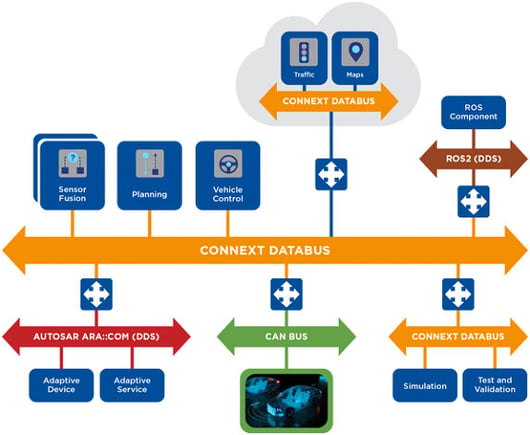
DDS标准实现了数据流安全性,该安全性可保护数据本身,保护数据,同时实现高性能和可扩展性。
DDS标准中定义的细粒度安全性允许系统验证、控制访问、加密和标记数据以及记录所有不成功的连接。所有这些都与运输安全性选项无关。这使开发人员可以将不同的安全配置应用于每个操作域。一方面,在高性能的车载通信中,开发人员不应浪费时间和资源来加密所有数据,而应控制诊断端口。例如,当连接一个已知的应用程序时,这可确保它仅读取一些预先约定的信息,而绝不会恶意注入数据。另一方面,在远程通过Internet交换某些数据时,使用安全的传输并对所有内容进行加密至关重要。这种体系结构可以有效地保护系统免受攻击,并防止其他供应商或外部应用程序接收或发送不应接收的数据。
最后,此体系结构隔离了系统中需要更高认证级别的那些部分。很有可能会出现一个混合动力系统,其中某些零件使用的动力最高可达ASIL-D(例如车辆控制),而其他零件则根本没有通过认证-l(例如遥距操作)。该体系结构允许对所有组件使用相同的连接解决方案和设计模式,但是增加了根据安全要求部署不同实现的功能。同时,借助端到端的QoS设置(例如期限,活泼性或可靠性),它允许您跨不同的认证级别安全地交换数据。
许多全球顶级汽车公司之所以选择这种基于标准的方法,是因为它们不想仅仅局限于一种方法。重要的是要选择一种面向未来的架构,该架构应集成不同的技术和标准,提供安全且可验证的解决方案,扩展到成千上万的数据点,实时执行并可以发展以适应未知的未来需求。这是未来的汽车。
关于作者
Sara Granados Cabeza在软件开发、中间件、硬件编程和计算机视觉方面拥有10多年的经验。她于2011年以RTI工具团队的软件工程师的身份加入RTI,在那里她为LabVIEW和C / C ++分布式记录仪开发了RTI DDS工具包。在过去的几年中,Sara一直是EMEA地区的现场应用工程师,在这里她帮助客户将RTI Connext DDS集成到他们的系统中。
Sara毕业于计算机工程硕士学位,并获得了博士学位。都来自西班牙格拉纳达大学的计算机和网络工程专业(Cum Laude)。
关于RTI
Real-Time Innovations (RTI) 是工业物联网(IIoT)连接公司。RTI Connext®数据总线是一个实时共享信息的软件框架,使应用程序作为一个集成系统一起工作。它跨任何地点相连接。它的可靠性、安全性、性能和可扩展性在最苛刻的工业系统中得到了验证。部署的系统包括医疗设备和成像;风能、水力和太阳能;自动飞机、火车和汽车;交通管制;石油和天然气;机器人、船舶和国防。
关于创景科技
创景科技致力于智能化设备与系统更安全、更可靠,秉持严谨高效、协作共赢的价值观,为工业物联网、无人驾驶汽车、轨道交通、医疗电子、能源、工业控制和航空航天和国防等领域提供解决方案和技术服务。
创景科技为RTI在中国地区合作伙伴,如需更多信息请联系:
info@visionmc.com。

查询页面
查询内容
分享此博客文章

关于作者
开始试用Connext DDS
Connext®DDS是针对实时系统的数据分发服务(DDS)标准的全球领先实现。试用功能齐全的Connext DDS版本30天。
